Minus E #python #raspberry-pi #open-cv #hardware #drawing #installation #featured
An award-winning robotic system that creates large-scale representational drawings with scribbles.
[ View drawings | View source code on GitHub | Read in-depth documentation ]
 |
|---|
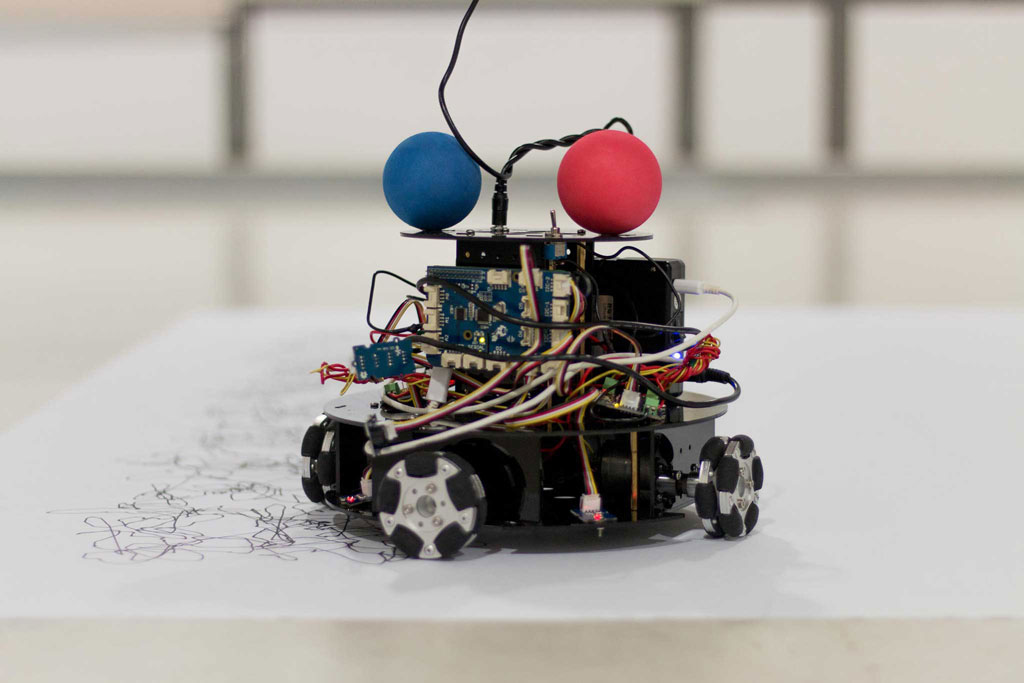
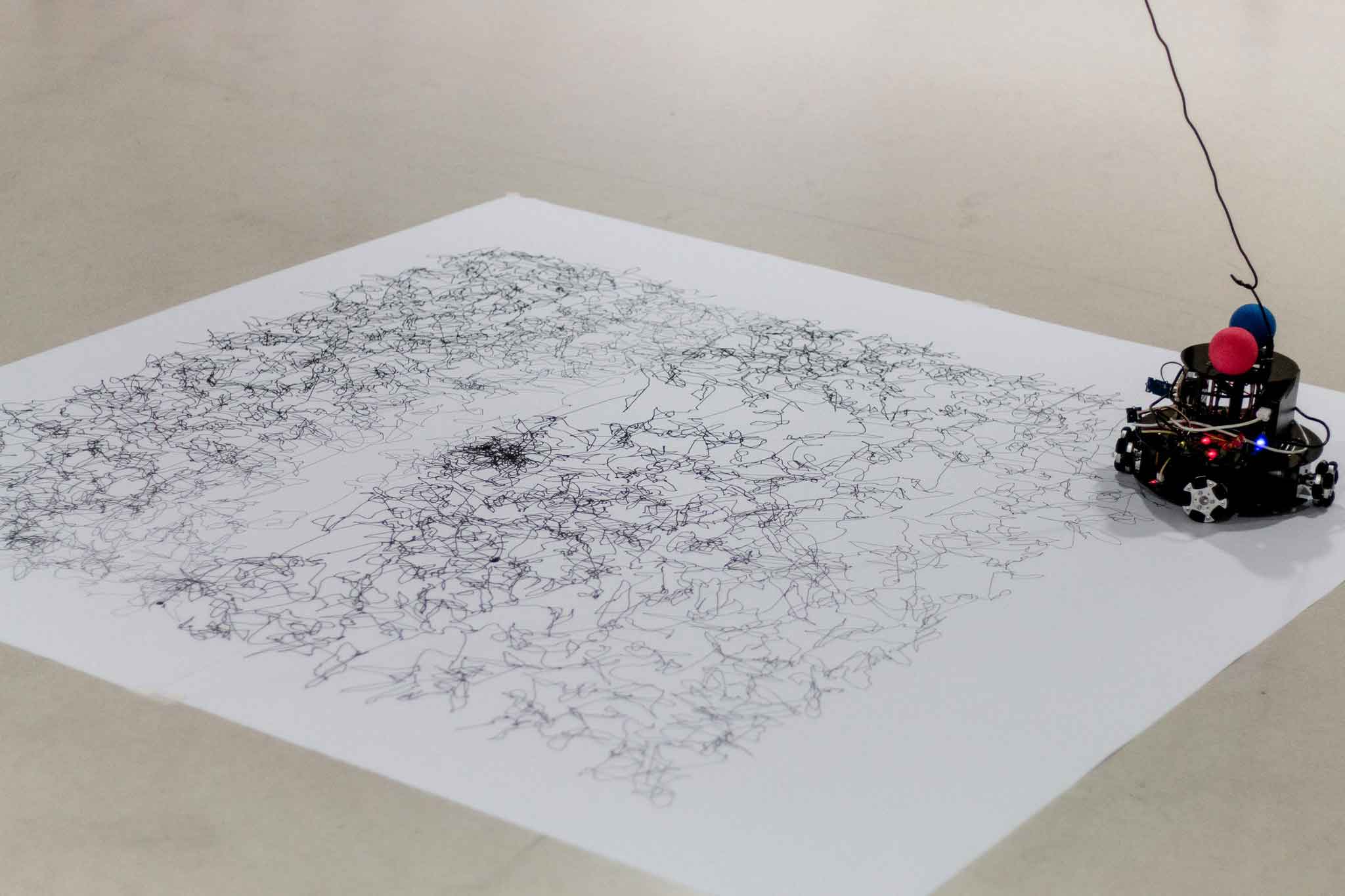
| Closeup of the mobile robot |
Minus E is a robotic system that creates large-scale representational drawings with scribbles. The system consists of two parts—a custom mobile robot that holds and moves the drawing instrument (usually a permanent marker), and a computer with a video camera attached that sees the robot and gives commands.
| Timelapse of the making of WWF (2017) |
|---|
 |
||
|---|---|---|
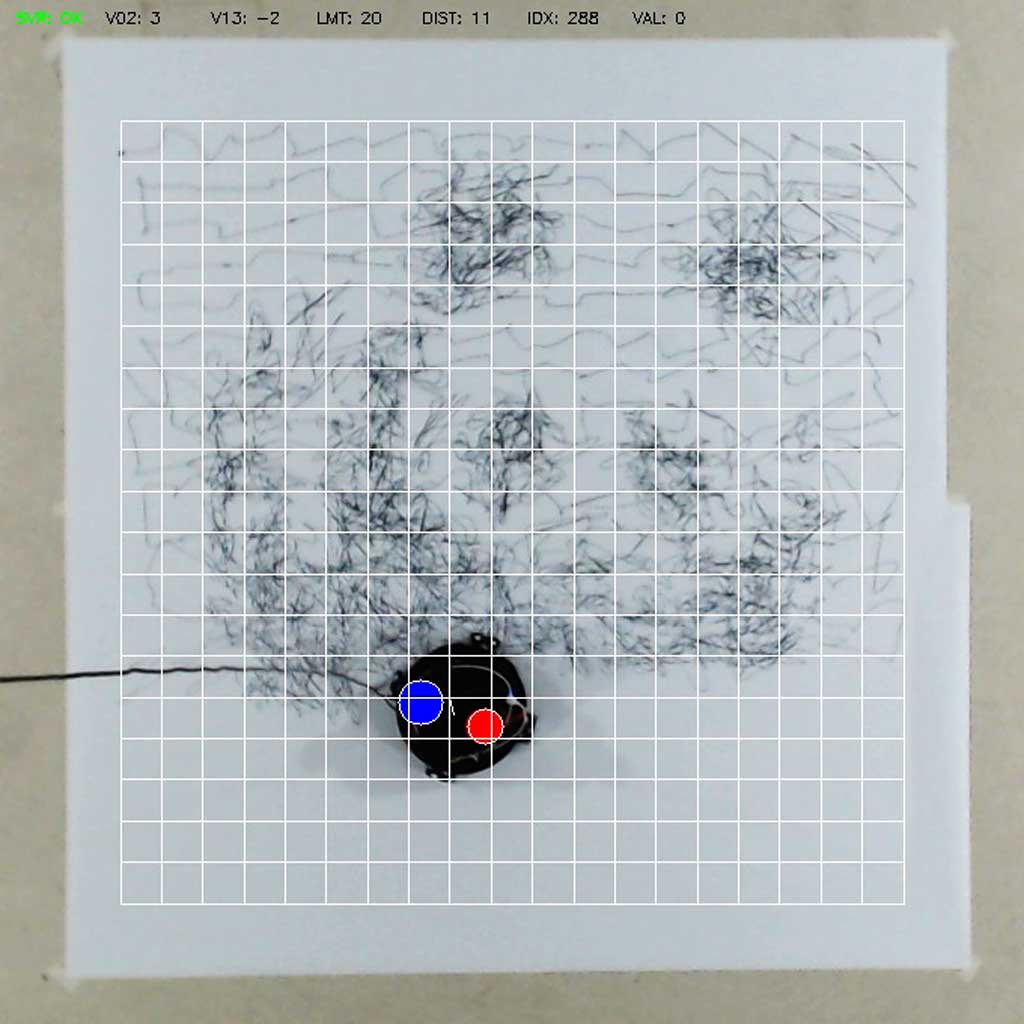
| WWF panda logo in original resolution | WWF panda logo converted to 20 x 20 px | Screenshot of custom software showing overlaid virtual reference grid |
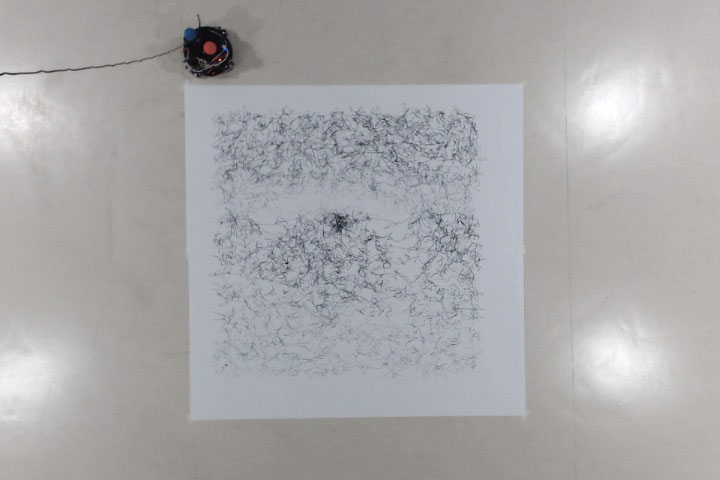
For each drawing, a large sheet (e.g. 176 × 176 cm or 5.8 × 5.8 ft) of paper or canvas is placed on the floor. The video camera is installed far above the material, facing down, so that the entire sheet of material is within its vision, and the robot is placed at the desired starting point with a drawing instrument placed at its center. On the computer that the video camera is attached to, a reference image is chosen (e.g. WWF panda logo) and then converted to a much smaller image (e.g. 20 × 20 px) by custom computer software. With the help of a virtual grid (each cell corresponds to a pixel in the reference image) layered on top of the material, the software then instructs the robot to move to the location of each cell to draw a different density of scribbles based on how dark a corresponding pixel is until the drawing is finished.
 |
|---|
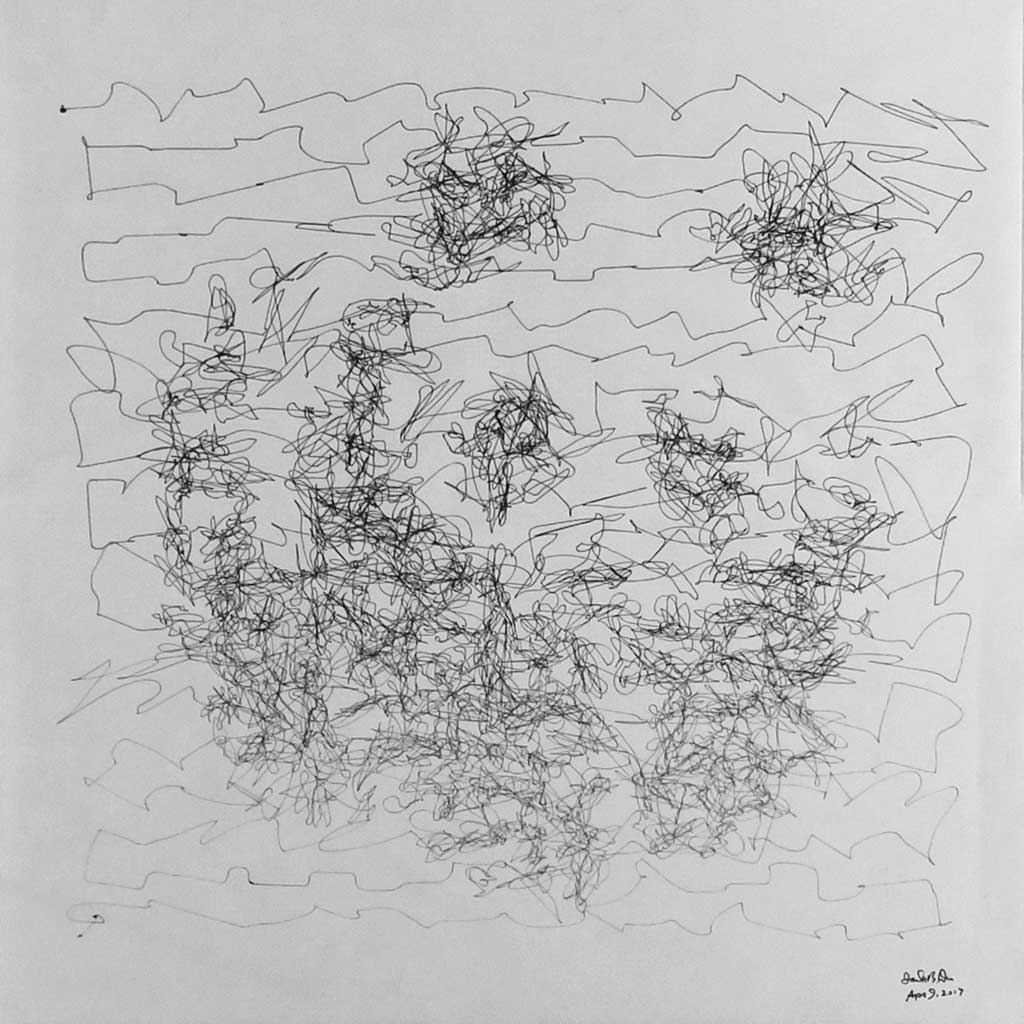
| WWF (2017), ink on paper, 176 x 176 cm (5.8 x 5.8 ft). |
The final drawing is usually abstract when observed closely, and reveals a clearer impression of the referenced image when viewed afar. This painterly style is a result of some design choices that deliberately embrace the imperfections in the creation process—the irregularities in the wireless connection, the imprecision of low-cost motors and slippery wheels, and the inaccuracies of color tracking for positioning.
Minus E was developed as a part of my undergraduate capstone project for Interactive Media Arts at New York University Shanghai. I had this idea of building a drawing robot because I was taking a lot of visual art classes at the time and I had always enjoyed building robots. I started this project by doing research on existing drawing robots and machines. The projects I found in my research can be roughly divided into two categories—mobile robots that create abstract works and robotic arms or plotters that create precise representational works. Ultimately, I decided to challenge myself to design a mobile robot that creates representational works.
 |
 |
|---|---|
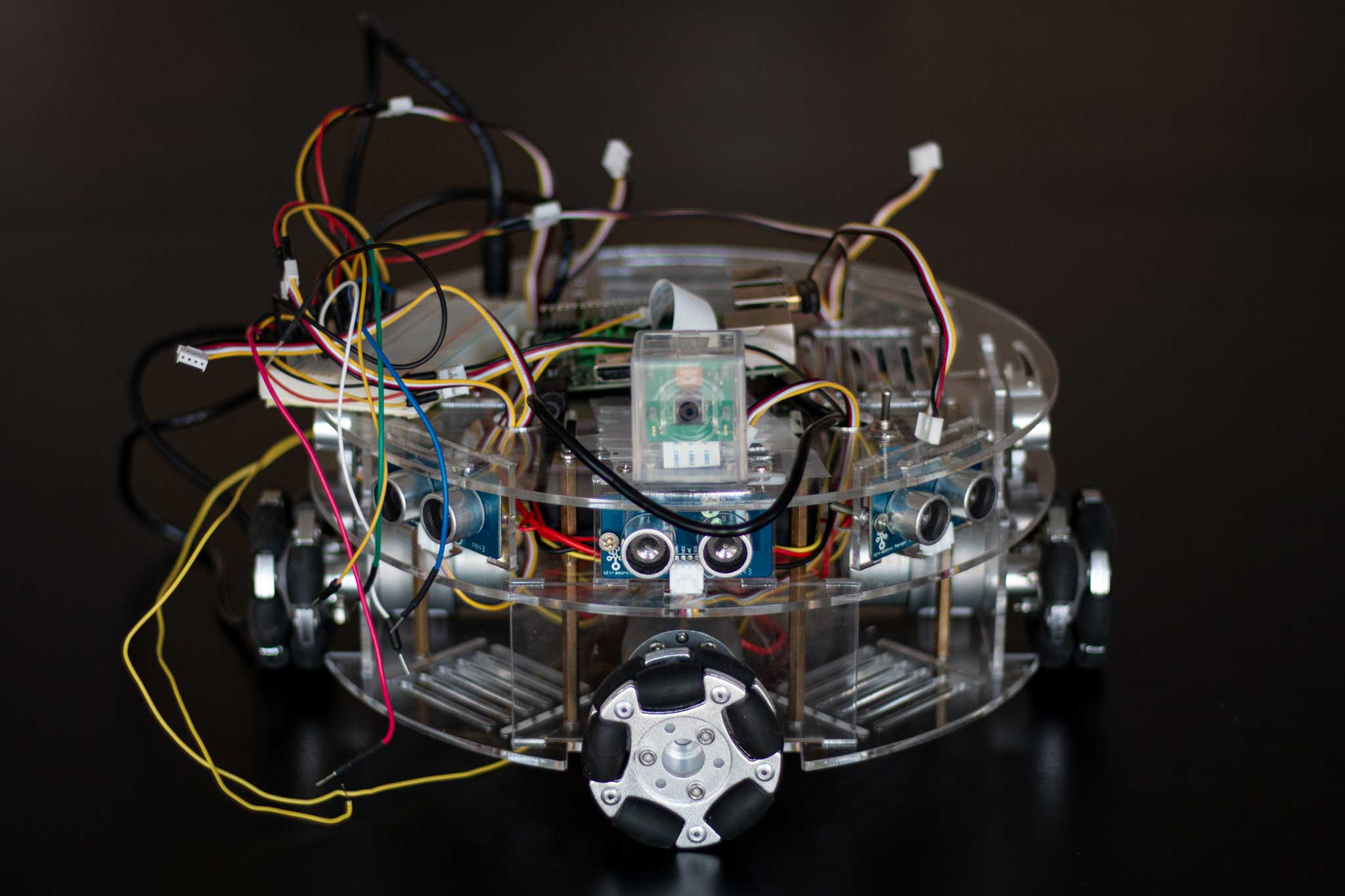
| Minus E prototype | Minus E prototype drawing on whiteboard |
I used a remote-controlled robot that I built previously as the starting point. It turned out it was not too difficult to turn my previous robot into a drawing robot. I simply taped a marker on the side of the robot, and drove it around on a whiteboard. It worked! Of course, I designed a new chassis specifically for this drawing robot. This new design includes a series of holes in the middle of the chassis so a marker can be easily inserted. I also included a couple of modular parts for better flexibility in later stages.
 |
 |
|---|---|
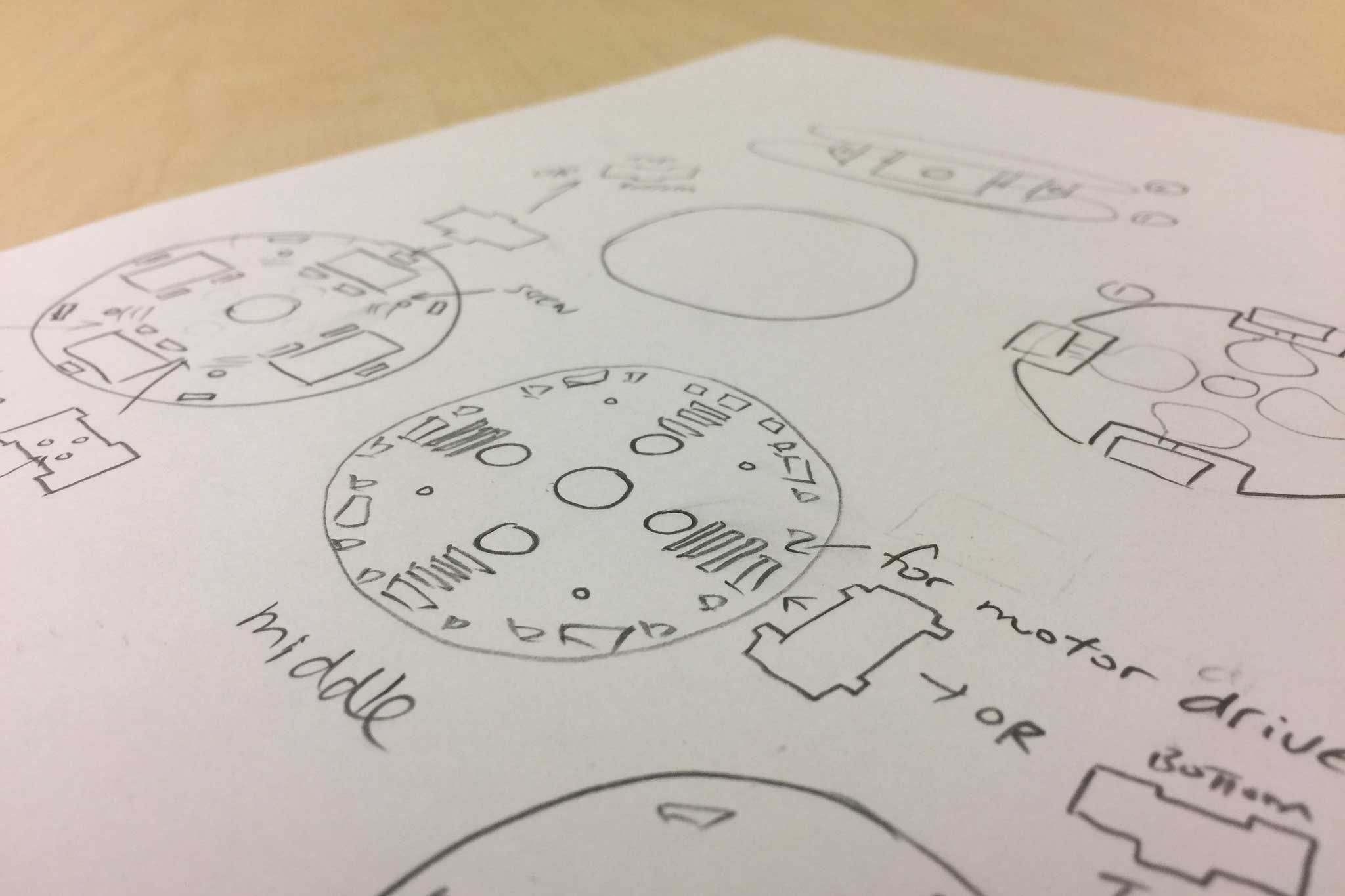
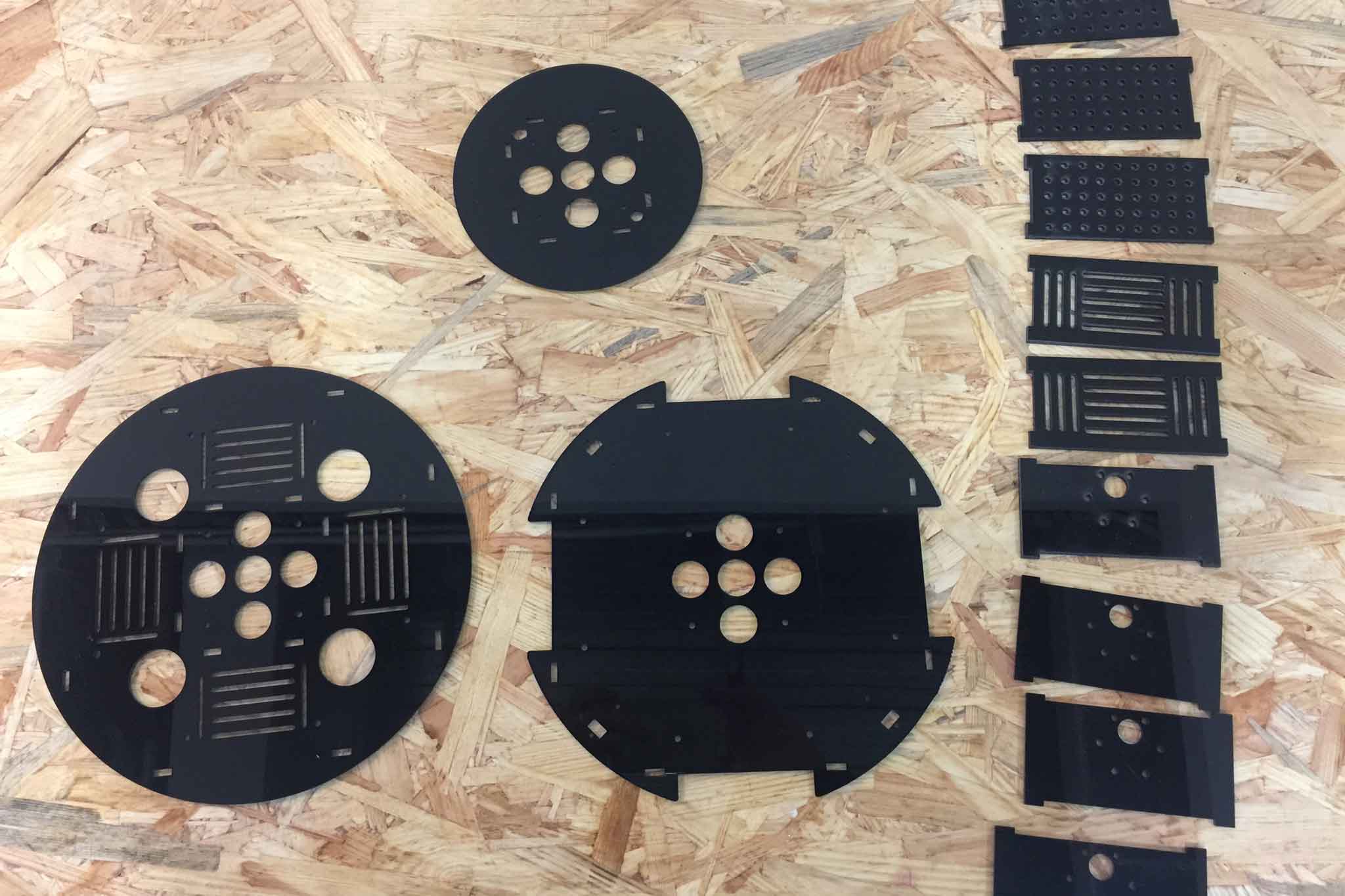
| Original sketches for Minus E chassis deisgn | Laser cut Minus E chassis pieces |
The hardest part was positioning. I thought about and tested many different methods, but eventually landed on color tracking. With two color markers attached to the top of the robot and a video camera facing down at the floor, the custom software that I developed was able to track both the robot’s position and rotation, thus being able to instruct the robot to move towards a designated point.
 |
|---|
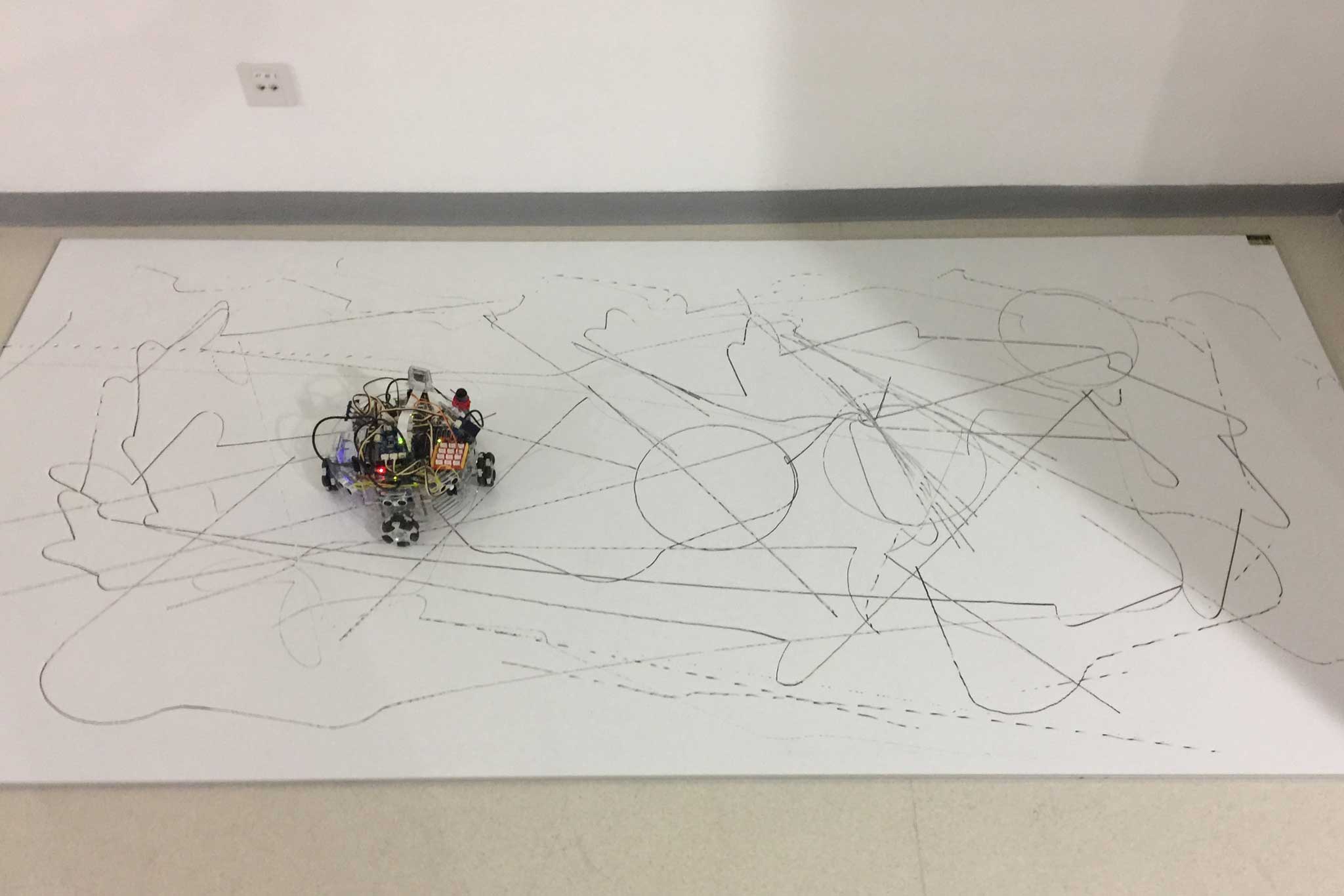
| Minus E instructed to draw a rectangle |
As is illustrated above, the robot’s movement is far from precise. How do you create representational drawings without precise movements? My solution was to deconstruct the reference image into smaller units.
 |
|---|
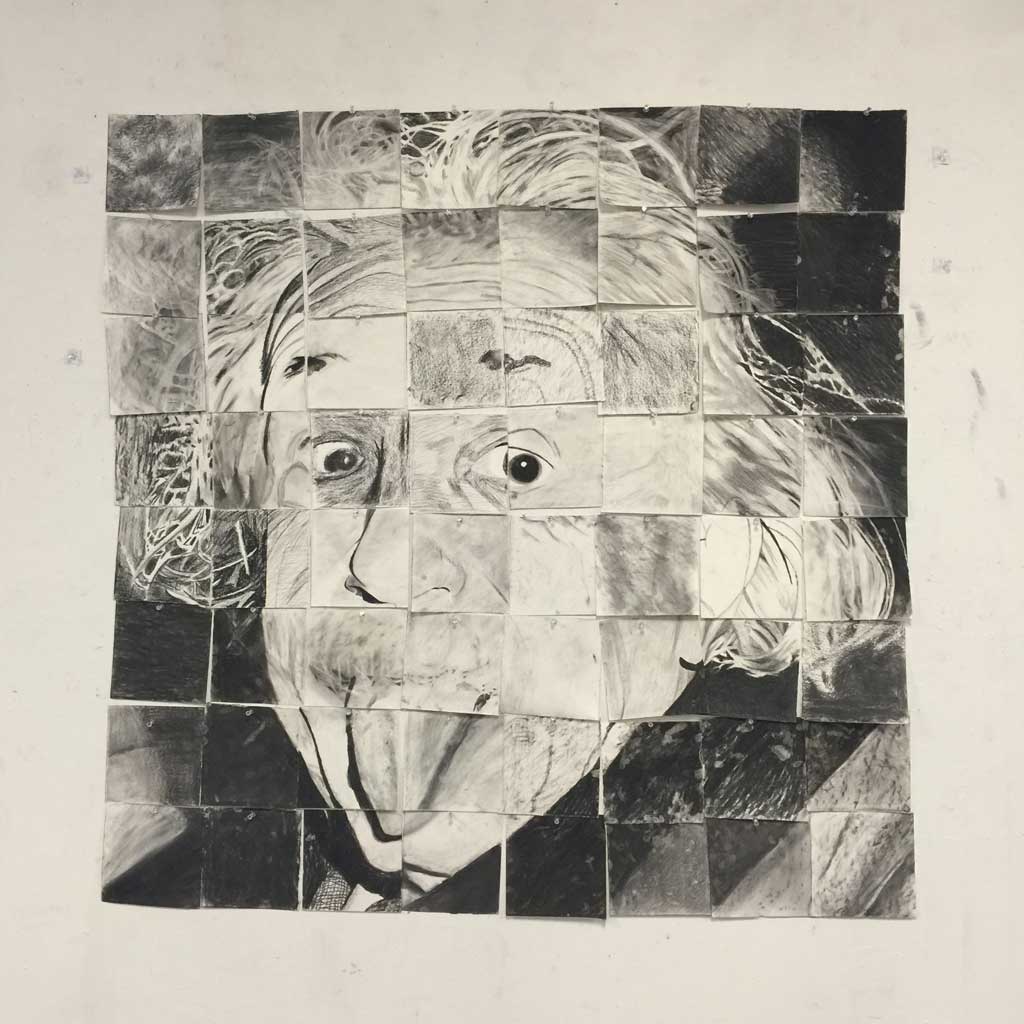
| Albert Einstein’s portrait formed by small pieces of drawings by different students in my class |
In a drawing class I took at New York University Steinhardt, the professor asked the whole class to make drawings based on different pieces of reference images that were handed to us separately. It was not until the professor assembled all the drawn pieces that we realized we were all drawing parts of an Albert Einstein’s portrait. This class, along with American artist Chuck Close’s use of a grid to break down portraits, convinced me that if I use a grid to divide a reference image into smaller units, Minus E should be able to move around and fill up each unit with different amounts of scribbles that eventually form a representational drawing.
 |
 |
 |
|---|---|---|
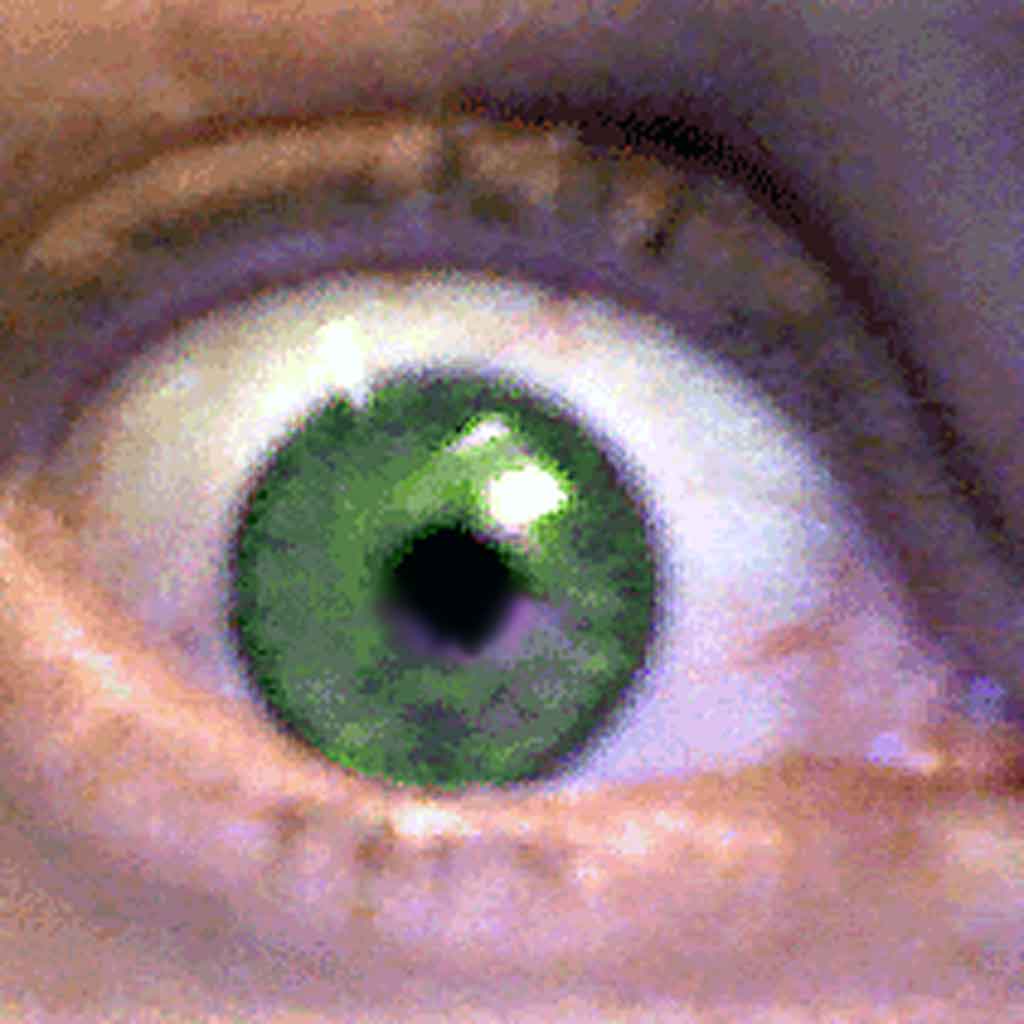
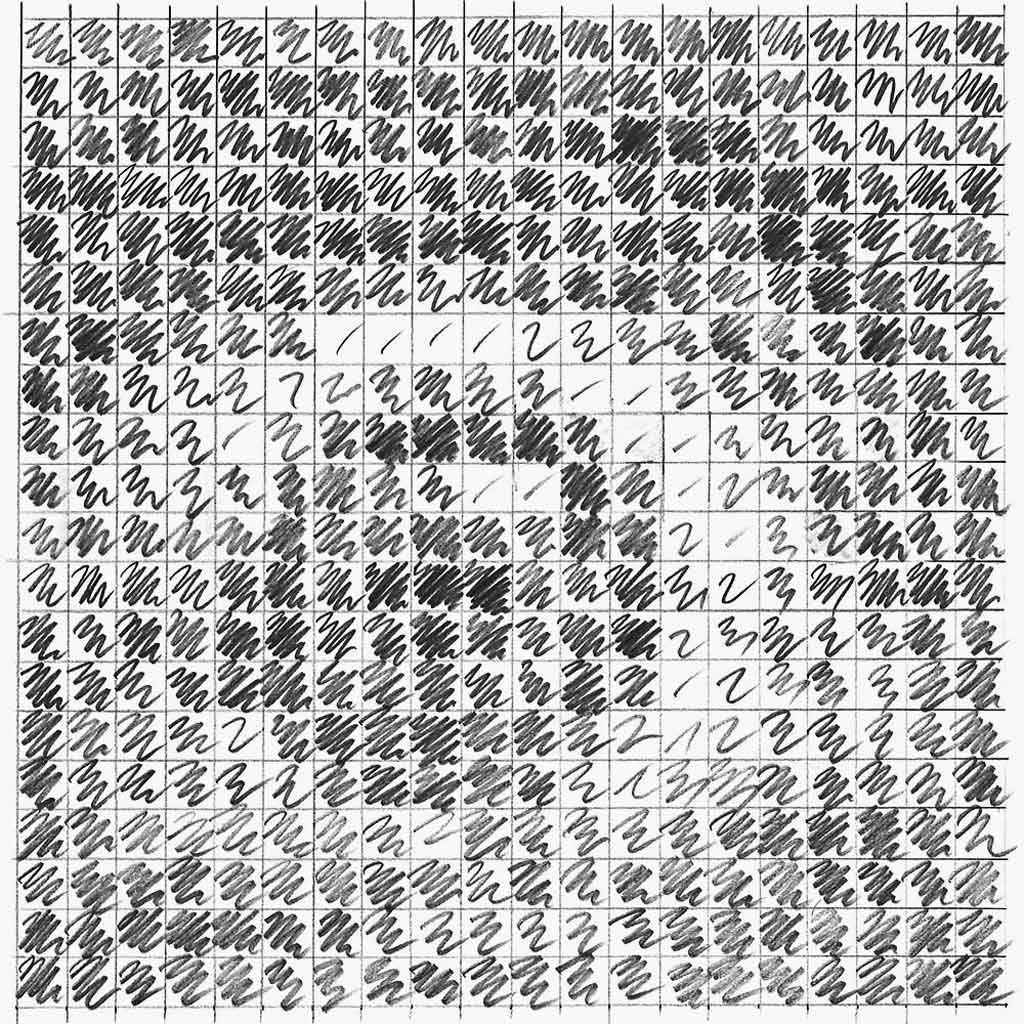
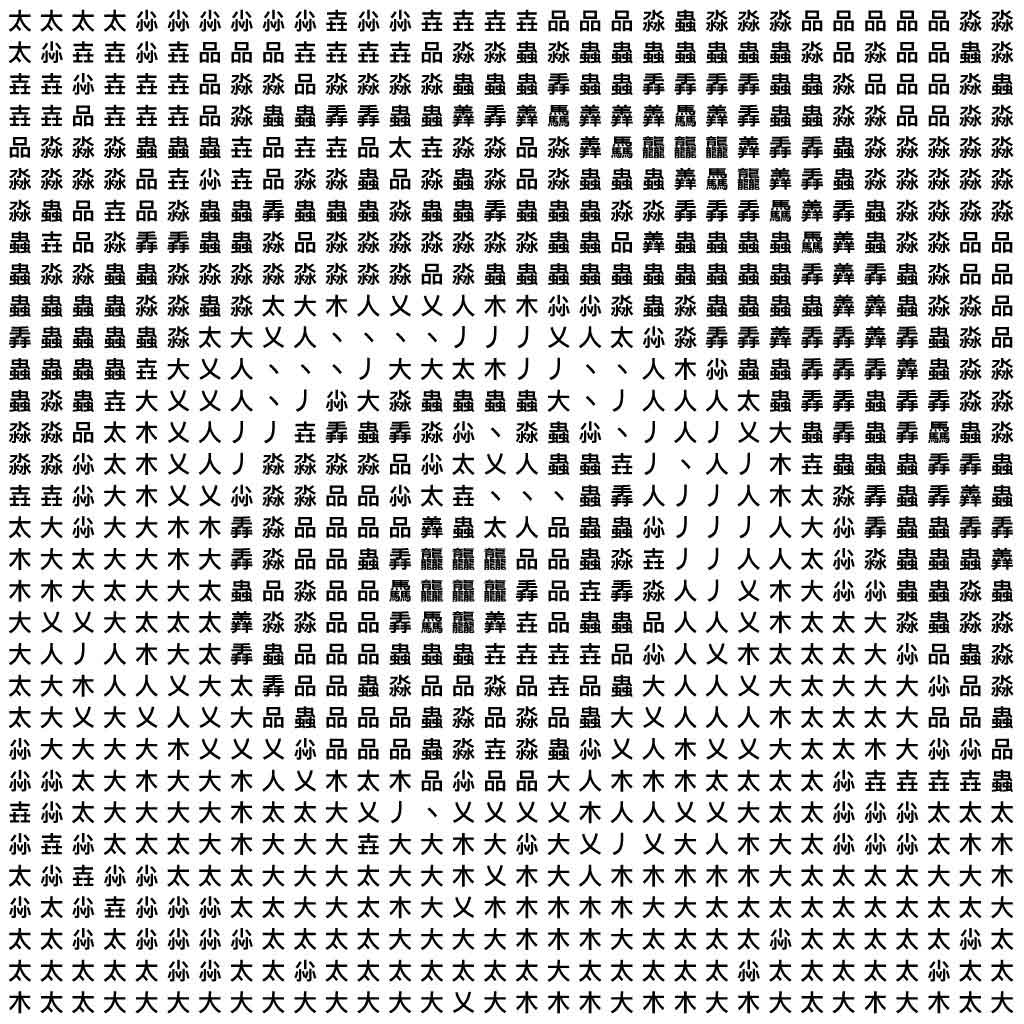
| Clay Shirky’s Twitter profile picture (2017) | Shirky’s Eye (2017), graphite on paper, 20 x 20 cm (7.9 x 7.9 in). | Shirky’s Eye (2017), formed by a grid of Chinese characters |
To further test the feasibility of this idea, I created a pencil sketch of Clay Shirky (my former professor)’s eye using a grid of small scribbles. I also did a similar experiment using a grid of Chinese characters of different complexities, which ultimately evolved into Mandarinizer, an experimental camera app. One of the first test drawings Minus E did was based on the same picture of Clay Shirky’s eye.
 |
 |
|---|---|
| Minus E finishing Shirky’s Eye (2017) | Minus E next to finished Shirky’s Eye (2017) |
Minus E was exhibited at numerous venues and won multiple awards, including 5th place at the Robot Art Competition, competing against robot research labs around the world. It was also featured on the cover of an issue of New York University Shanghai’s self-published magazine.
 |
|---|
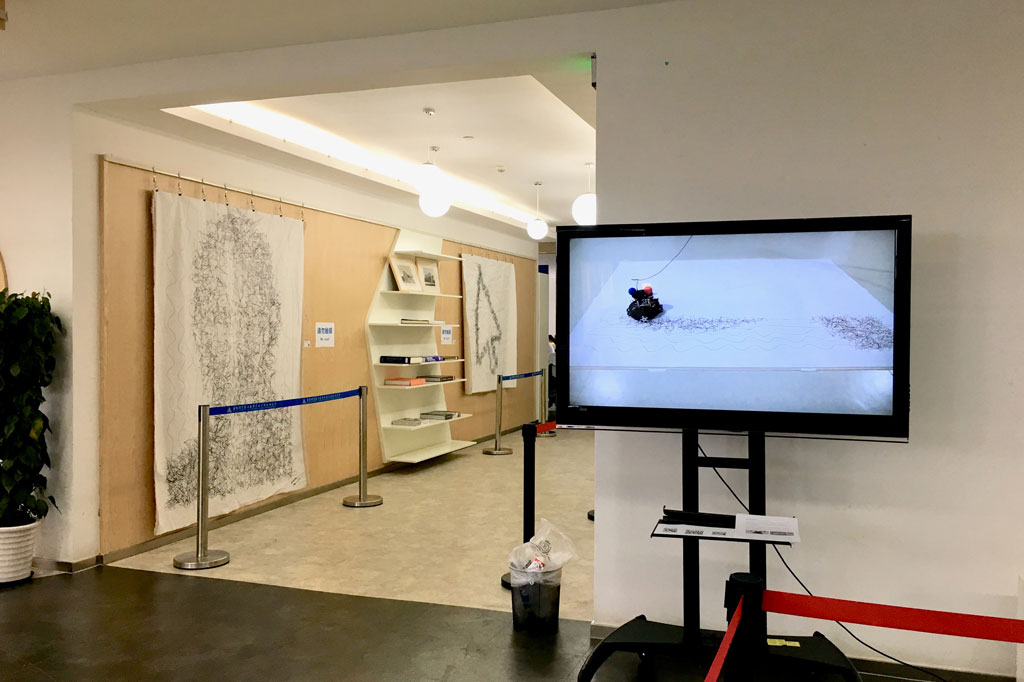
| 2017 | Minus E’s drawings exhibited at Maker Exhibition, Shanghai Library, Shanghai, China |
 |
|---|
| 2017 | Minus E and its drawings exhibited at Life Geek Exhibition, USC-SJTU Institute of Cultural & Creative Industry, Shanghai, China |
Exhibitions
2017 | Life Geek Exhibition, USC-SJTU Institute of Cultural and Creative Industry, Shanghai, China
2017 | Maker Carnival, Knowledge & Innovation Community, Shanghai, China
2017 | Maker Exhibition, Shanghai Library, Shanghai, China
2017 | Shanghai Science Expo, Shanghai Exhibition Center, Shanghai, China
2017 | Undergraduate Research Symposium, NYU Shanghai, Shanghai, China
Talks
2018 | Making Art with a Robot, Zaojiu, Shanghai, China
2017 | Ordered Randomness, New Media Art and Cultural & Creative Industry Conference, Shanghai, China
Awards
2017 | Excellence Award at Shanghai International Digital Creation, Innovation & Entrepreneurship Competition, China
2017 | Best Technology/Visual Demonstration at Undergraduate Research Symposium, NYU Shanghai, China
2017 | 5th Place at Robot Art Competition, USA
Press
2018 | “我为什么要费尽心思造出一个不完美的绘画机器人?” [Why Did I Painstakingly Build an Imperfect Drawing Robot?], Zaojiu, July 19, 2018
2018 | “机器时代即将到来|新锐艺术家专访” [Emerging Artist Interview: the Age of Robots is Around the Corner], MANA, July 16, 2018
2018 | Qiu, Wenhan: “谁说‘码农’不能搞艺术?上海纽约大学这门专业让学生大胆‘跨界’” [Why Can’t Coders Create Art? This Major at NYU Shanghai Allows Students to Bravely Cross Disciplines], Shanghai Observer, Apr. 16, 2018
2018 | Turner, Juliet: “Creative Machines”, NYU Shanghai Magzine, Spring 2018
2017 | Chapman, Catherine: “Robot Artists Compete for Thousands of Dollars at This Painting Competition”, Vice, May 23, 2017.
2017 | Robitzski, Dan: “These 14 Stunning Works of Art Were Made by Robots”, Inverse, May 19, 2017.
2017 | Haridy, Rich: “Art in the age of ones and zeros: Robot art”, New Atlas, May 16, 2017.
2017 | Daley, Jason: “Check Out This Year’s Entries to the RobotArt Competition”, Smithsonian, Apr. 28, 2017.